机器狗关节电机驱动mos管驱动术
在四足机器狗轻盈跨越障碍的背后,是一套精密的动力系统在默默工作。其中,关节电机如同机器狗的肌肉,而控制这些肌肉收缩与舒张的神经中枢,正是MOS管驱动电路。当机器狗凌空翻转却在半空卡顿,或是打出的拳绵软无力时,问题往往出在驱动环节。
MOS管:电机驱动的效率核心
电机驱动电路的核心拓扑是H桥结构,它由四颗MOS管组成,通过交替导通实现对电机正反转的精准控制。MOS管在此扮演了高速电子开关的角色,其性能直接决定了整个驱动系统的效率、响应速度和可靠性。
与传统的IGBT等功率器件相比,MOS管在电机驱动中展现出显著优势。其导通电阻极低,现代优质MOS管的R_DS(on)甚至可降至1毫欧以下。这意味着在持续30A电流的情况下,单管导通损耗仅为0.9瓦,相比同规格IGBT高达45瓦的损耗,效率提升达50倍。这种效率优势直接转化为更长的机器狗续航时间和更低的工作温度。
开关损耗:机器狗敏捷性的隐形杀手
机器狗运动流畅性的关键指标之一是关节电机的响应速度,而这与MOS管的开关特性密切相关。MOS管作为单极型器件,开关速度可达纳秒级,典型100A/650V MOS管的开通时间约50纳秒,关断时间约80纳秒。这种快速的开关能力使得机器狗能够实现毫秒级的动作调整。
开关过程中的损耗却不容忽视。某24V/10A有刷电机驱动器在20kHz PWM频率下,使用反向恢复时间trr=400ns的MOS管时开关损耗达2.3W,驱动器温升高达85℃;更换为trr=80ns的快速恢复型号后,损耗降至0.8W,温降显著改善至52℃。这就像普通开关与光电开关的区别——前者在开合过程中会产生更多火花和磨损,而后者能够几乎无损耗地瞬间完成状态切换。
死区时间:机器狗平稳性的精密平衡术
在H桥电路工作中,上下管切换之间存在一个极其关键的死区时间设置。这个微小的间隔是为了防止上下管直通导致短路。死区时间控制要求极为严格,偏差需小于5ns,否则会引起相电流波形畸变,产生转矩脉动。
某无人机电调就曾因上下管驱动芯片传播延迟差异10ns,导致电机高速运转时抖动严重。这好比两人协作拉锯,如果动作节奏稍有偏差,不仅锯木效率低下,还会导致锯身剧烈振动。解决这一问题的方案是采用集成驱动IC,如L6387D,其内置死区时间控制精度可达1ns,确保了机器狗关节运动的平稳性和精确性。
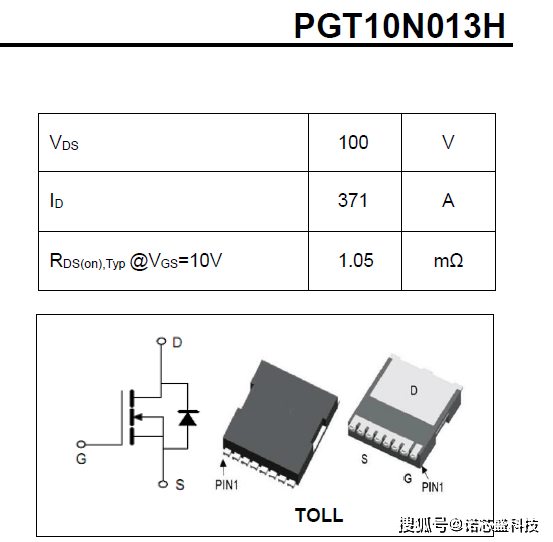 机器狗关节驱动MOS管PGT10N013H 100V 371A
机器狗关节驱动MOS管PGT10N013H 100V 371A
续流路径:机器狗制动过程的能量管理
当机器狗需要快速停止或改变方向时,电机绕组会产生反电动势,形成续流电流。传统方案依靠MOS管内部的体二极管进行续流,但硅材料二极管的正向压降高达1.5V,会产生较大损耗。
优化方案是在MOS管外部并联快恢复二极管(VF=0.5V),可将续流损耗降低60%。某48V/50A无刷电机控制器采用此方案后,效率从94%提升至96.5%。这类似于在河道主流旁开挖一条更平缓的支流,让洪水期水流更顺畅地通过,减少对主河道的冲击和能量损失。
更先进的方案是采用同步整流技术,在续流阶段主动开通MOS管,利用其低阻沟道替代体二极管,使导通压降从1.5V降至0.1V,续流损耗降低93%。这种技术让机器狗在急停、快速转向等高频动态动作中表现出色。
过流保护:关节电机的安全卫士
堵转是机器狗工作过程中最恶劣的工况之一,当关节突然被卡住时,电流可能瞬间飙升至额定值的5-10倍。过流保护必须在5-10μs内快速响应,否则MOS管将面临烧毁风险。
某电动滑板车驱动器采用硬件电流采样加比较器方案,响应时间8μs,成功在堵转时保护了MOS管;而另一产品采用MCU ADC采样,响应时间达50μs,导致多次烧毁60A MOS管。这如同触电保护器与普通保险丝的区别——前者在毫秒级内切断电路,而后者可能还未熔断设备就已损坏。
电压应力与热设计:可靠性双支柱
机器狗关节电机在高速运转时会产生反电动势,急刹车时反电动势会与电源电压叠加,对MOS管形成电压应力。例如,24V电机在最高转速时反电动势可达20V,急刹车时MOS管可能承受44V电压。考虑20%的电压尖峰裕量,Vds额定值应选择80V以上。某产品就曾因选用60V MOS管,在急刹车时发生击穿损坏。
热管理同样关键。机器人关节驱动器的负载具有周期性变化特点,需同时评估RMS电流下的稳态温升和峰值电流下的瞬态温升。某机器人关节驱动器RMS电流15A,峰值40A(1ms周期),采用Rds(on)=4mΩ的MOS管,计算得稳态功耗0.9W,瞬态功耗6.4W。TO-220封装因热容不足,导致结温瞬时超过150℃,更换为TO-247封装并加装散热片后问题得以解决。
未来展望:MOS管技术的创新方向
随着机器狗向更高性能、更长时间续航发展,对关节电机驱动MOS管提出了更高要求。氮化镓(GaN)功率器件正在逐步展示其在高频、高效率方面的优势。与传统硅基MOS管相比,氮化镓器件具有更低的开关损耗和更高的开关频率,有望进一步提升机器狗的动态响应能力和能源利用效率。
同时,集成化也是重要发展趋势。将驱动电路、保护电路和MOS管一体化封装,可以减小系统体积,提高可靠性,特别适合空间受限的机器狗关节应用。
机器狗关节电机的驱动MOS管虽是小元件,却承载着机器狗运动性能的重大责任。从H桥结构到死区控制,从续流路径优化到过流保护,每一个细节都影响着机器狗的整体表现。通过精心选择和优化MOS管及其驱动策略,我们能够让机器狗动作更加精准、有力、流畅,为机器人技术在各种应用场景中的推广奠定坚实基础。