原创 无需大脑、传感器或软件即可移动、导航和适应环境的微型机器人
这些微型机器人利用形状与柔韧性,在无需传感器、代码或控制的情况下实现移动、适应与导航。
莱顿大学的研究人员开发出了一种微型机器人,它们无需大脑、传感器或软件即可移动、导航和适应环境。它们的行为完全由其物理结构及与环境的相互作用驱动。
这些机器人仅有几十微米长,比人类发丝的直径还要小得多。尽管尺寸微小,它们却能以栩栩如生的方式游动并对障碍物做出反应。
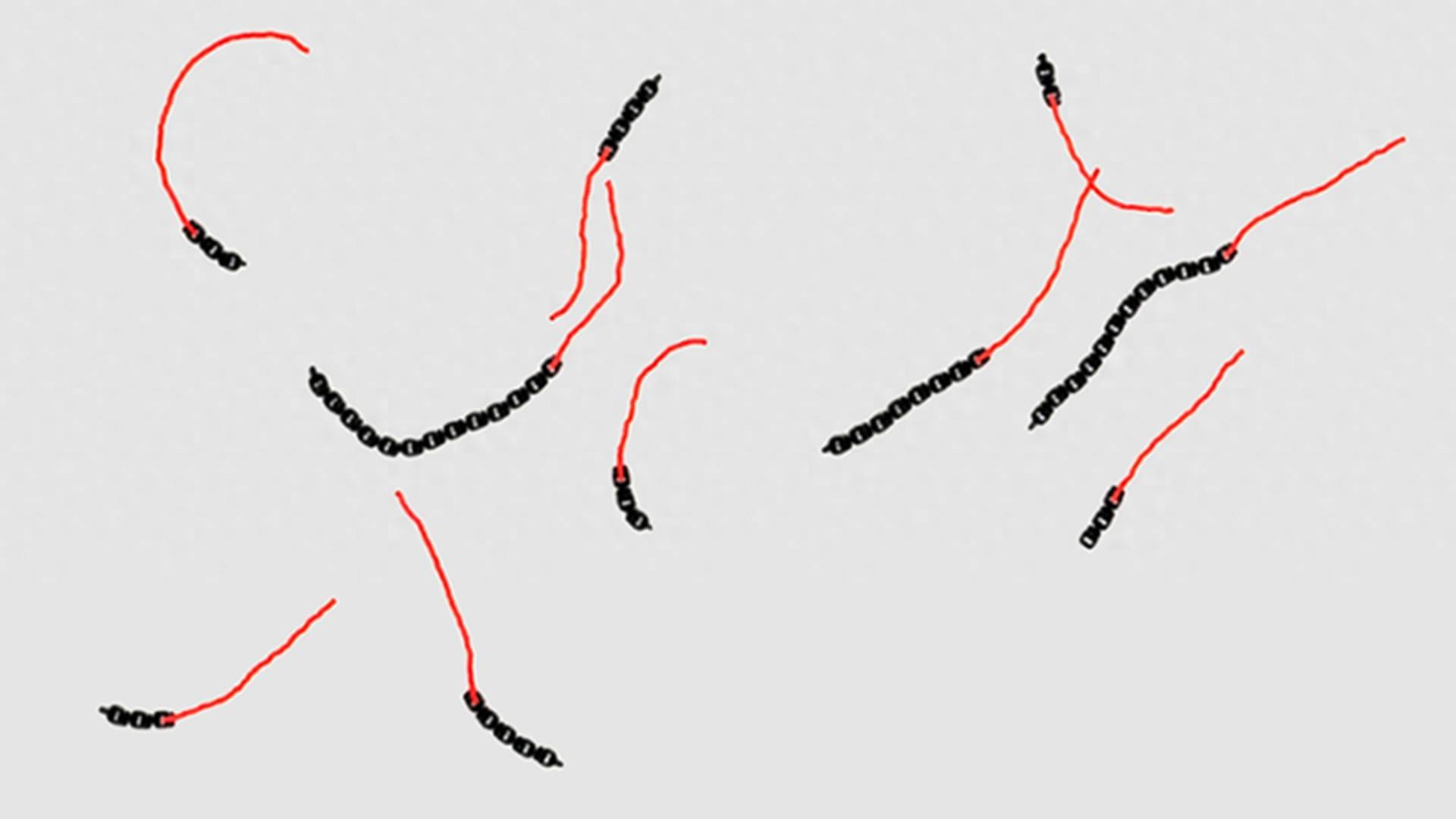
由Daniela Kraft教授和研究员孟世伟(音译)领导的团队将这些机器人构建为由连接节段组成的柔性链条。当暴露于电场中时,这些结构便会自行开始移动。
这些机器人不依赖电子元件,而是利用其形状和柔韧性来产生运动,并实时调整以适应周围环境。
源于自然的柔性运动灵感
这一概念基于动物的运动方式。蠕虫和蛇通过连续改变身体形状来穿越狭窄复杂的空间。
Kraft教授表示:"蠕虫和蛇等动物在移动时会不断调整自身形状,这有助于它们在环境中导航。宏观机器人同样利用柔韧性来实现其功能。然而,直到现在,微型机器人要么小而坚硬,要么大而柔软。我们想知道是否能在实验室里造出既小巧又柔韧的微型机器人。"
为了制造这些机器人,团队使用了高精度的3D微纳打印机。每个元件的尺寸约为5微米,由小至0.5微米的关节连接。
这些结构被构建为由自推进元件组成的链条,这些元件共同产生运动。一旦被激活,机器人会以大约每秒7微米的速度移动。
其制造过程采用了尖端的微纳打印系统,能够在当前制造技术的极限条件下运行,从而在极小的尺度上实现了柔韧性与结构精度的结合。
被激活时,机器人会以波浪状运动。其柔性设计使它们无需程序指令即可弯曲并向前推进。
形状驱动智能行为
研究人员发现,机器人的运动与形状会持续相互影响。这种反馈使它们能在环境变化时自动进行调整。
Kraft教授补充道:"但这还不是全部。我们发现机器人的形状与运动之间存在持续的反馈:形状影响其移动方式,而移动反过来又改变其形状。因此,这个微型机器人能够感知环境如何改变其身体并对其做出反应,这使它表现得栩栩如生。这意味着我们无需集成微观电子元件就能赋予其智能能力。"
这些机器人无需任何控制系统即可避开障碍物并改变方向。它们还能在拥挤的环境中移动,并将路上的物体推开。
研究员孟世伟说:"当机器人减速甚至停下时,它会开始摆动尾巴,仿佛想要挣脱束缚。"
研究人员表示,这项技术有望支持靶向药物输送和微创手术等应用。下一步工作是更好地理解此类行为是如何从简单的物理相互作用中产生的。
该研究发表在《美国国家科学院院刊》上。
如果朋友们喜欢,敬请关注“知新了了”!