北大谢广明教授团队顶刊IJRR发布!首创基于电感知的SLAM技术,让机器人告别“水下睁眼瞎”
在水下世界的探索中,机器人正面临着一个尴尬的困境——在深海、洞穴、浑浊河口或污染扩散区等关键区域,它们如同“睁眼瞎”。传统的传感器在黑暗、浑浊或特征稀少的环境中常常失灵,这直接导致水下机器人的定位与建图(SLAM)精度大幅下降,甚至完全失败。
那么,能否赋予机器人一种不依赖光线与声音的全新“第六感”?
近日,北京大学先进制造与机器人学院谢广明团队在机器人领域国际顶级期刊《The International Journal of Robotics Research》(IJRR)上发表重要研究成果,提出Electro-SLAM——一种集成主动与被动电感知的分布式水下同步定位与建图(SLAM)系统。该研究为复杂、黑暗及浑浊水域中的水下机器人自主感知与协同作业提供了全新解决方案。

▍传统传感器为何失灵?
复杂水域环境的感知与探测长期以来是制约水下机器人发展和应用的关键瓶颈。目前尚缺乏一种在真实水下环境中兼具稳定性与鲁棒性的理想SLAM技术。
传统应用于陆地或空中场景的SLAM系统通常依赖视觉、激光雷达和声呐等传感模态,但在水下环境中均面临显著挑战:
- 视觉传感器易受光衰减影响,在黑暗或浑浊水域中难以工作;
- 激光雷达的有效探测距离会随水体浊度增加而急剧缩短;
- 声呐则对多路径效应和后向散射噪声高度敏感,容易引发感知混淆、定位漂移及地图残缺等问题。
受弱电鱼在黑暗浑浊水域中依赖电感知进行环境探测的生物机制启发,研究团队首次提出以电感知作为主要感知方式的水下SLAM系统框架
与传统基于视觉或声呐的方法不同,Electro-SLAM充分利用电感知在近距离环境感知中的独特优势,能够在视觉严重退化、光照极弱或水体高度浑浊等极端条件下,实现稳定可靠的边界检测与环境建图。
▍Electro-SLAM的仿生感知与群体智能
该系统无需外部基础设施支持,将生物启发式传感机制与分布式多机器人自主系统相结合,可在未知水下环境中实现可扩展的分布式环境感知与协同建图,为黑暗、浑浊及通信受限水域提供了一种全新的SLAM范式。
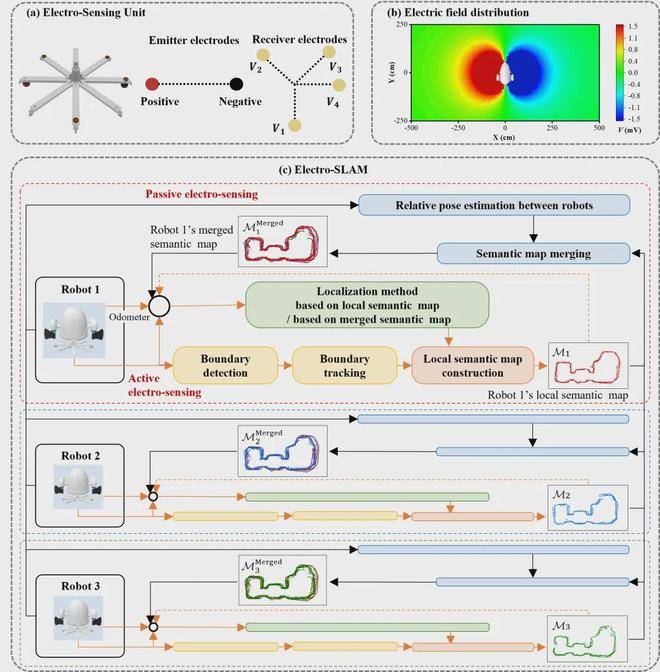
水下Electro-SLAM 系统框架
在具体方法上,研究团队提出了一种完整且轻量化的电感知硬件与算法解决方案,使得系统可轻松搭载于小型机器人上。它支持两种工作模式:
主动传感:机器人像弱电鱼一样主动发射电场。当电场遇到边界(如墙壁)或物体时会发生畸变,接收器通过分析畸变模式,就能反推出边界的距离、形状乃至材料是导电还是绝缘。
被动传感:机器人被动接收其他同伴发射的特定频率电场,从而估算出同伴的相对位置、方向和距离,实现机器人间的相互感知。
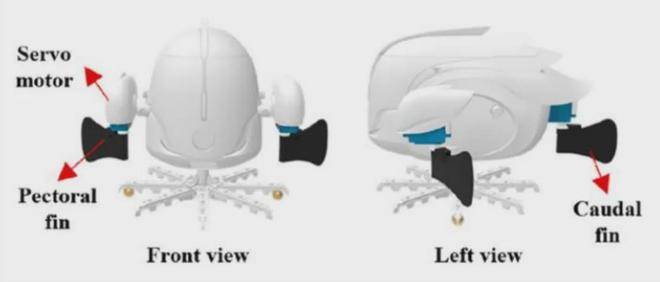
配备电传感单元的⼩型⽔下机器⼈
基于此,研究团队构建了一套基于主动电感知的单机器人SLAM系统,实现了边界检测、边界跟踪、局部语义映射以及分层定位功能。
进一步地,团队还提出了一套基于被动电感知的分布式多机器人协作SLAM方案,包括一种利用被动电感知实现的机器人间相对位姿估计方法,以及一个支持局部地图融合与协同定位的完全分布式系统框架。这有效解决了电感知缺乏传统几何特征或视觉描述符所带来的技术难题,极大提高了多机器人系统在未知水下环境中的探索效率和可扩展性。
▍精度与协同能力实现双重飞跃
研究团队使用定制的小型水下机器人,在水池中设置了包含交替导电与绝缘材料的复杂边界环境,对Electro-SLAM进行了全面验证。
单机器人测试结果令人振奋:与仅使用里程计的基线方法相比,结合了几何与材料语义信息的最高级定位策略(Od+Bound+Mat),将绝对轨迹误差(ATE)降低了超过60%,构建的语义地图也最完整(地图覆盖率最高)。
多机器人协同测试更是展现了分布式系统的优势。当三个机器人相互交换地图信息后,所有机器人的定位精度和地图质量均得到显著提升。地图覆盖率(MCI)在最终的三机协作模式下达到了88%至90%,较单机运行大幅提高。
此外,研究还通过对照实验验证了所提出的水下电场理论模型的准确性,并证明了系统可通过调整发射电压来适应从淡水到海水的不同电导率环境,展现了良好的环境适应性。
▍未来展望:开启水下具身智能新范式
该研究为水下非可视化、非结构化及通信受限环境中的自主定位与环境测绘奠定了重要基础,在水下探测、资源勘察、水下基础设施巡检及极端环境作业等领域具有广阔应用前景。
未来,研究团队将进一步优化系统架构,融合传统传感手段与创新理论建模方法,推动相关技术从实验室走向真实复杂应用场景,让前沿科技成果服务于更多实际需求。
从弱电鱼到水下机器人,Electro-SLAM巧妙地跨越了生物进化与工程创新的边界。在探索未知的深蓝之境时,最高效的智能,或许早已被自然演化写入了生命的最初代码之中。
论文链接:https://doi.org/10.1177/02783649251414426.