小电池亏电问题如何解决,现代电子电气架构如何改变了车辆睡眠与唤醒机制?
芝能汽车出品
在汽车智能化讨论中,“中央计算”“区域控制”“SOA”等概念已经被说滥,但一个问题被长期忽视:当汽车变成一台 7×24 小时运行的计算平台,车辆的休眠与唤醒机制究竟还能否维持稳定?
大多数消费者遇到的“几天不开车就亏电”“远程功能忽然失效”“车库里莫名其妙整车上电”背后,其实不是电池问题,而是 E/E 架构问题。
我们要回答的正是这个问题:现代电子电气架构如何改变了车辆睡眠与唤醒机制?为什么这件事关系到智能车未来五年的成败?
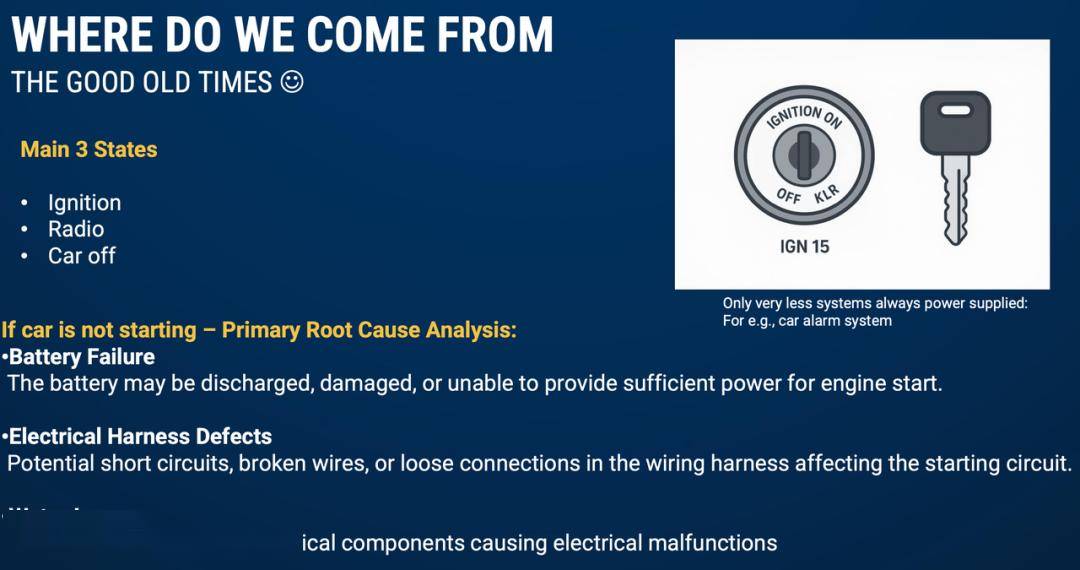
在过去的燃油车时代,E/E 架构很简单,车辆只有三种状态:点火、收音机模式、关闭。系统断电是“硬关机”,只有防盗等少数模块常供电。汽车电子工程师只需要担心线束短路、电池老化、进水等硬件故障。
唤醒方式纯靠钥匙,启动逻辑稳定可控,当软件功能数量从几十个飙升至数百上千,ECU 必须在无驾驶员的情况下持续运行,传统钥匙的逻辑被彻底打破,“谁来决定车辆什么时候睡、什么时候醒?”成为新的核心矛盾。
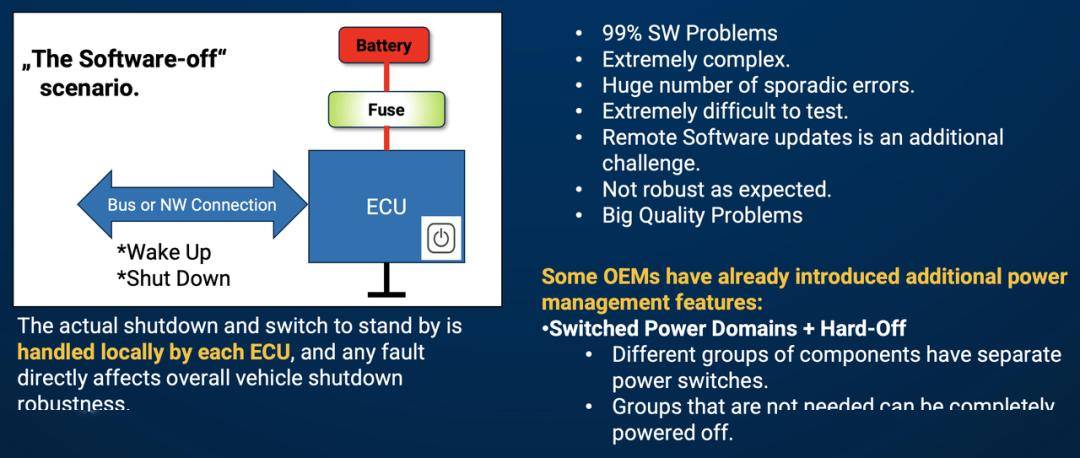
于是 TC10、CAN 唤醒、专用唤醒线等方案被堆叠到系统里,试图维持稳定。但这是注定失败的补丁的过程:ECU 各自为政、状态不一致、边界条件复杂、OTA 增加随机性,99% 的问题来自软件,任何一处节点异常都可能导致整车不关机或无法唤醒,真正的最痛苦的处理过程。
为什么在新能源车型上亏电问题频率远高于燃油车?
关键在于在传统架构里,供电是“被动的”,断电是“机械的”,但在现代车里,供电变成了软件决策,而软件本身又是最容易出现偶发错误的系统,很多车企尝试通过“电源域+硬关闭”来切分风险,但仍然依赖单 ECUs 的本地关机判断,本质并未改变复杂性。
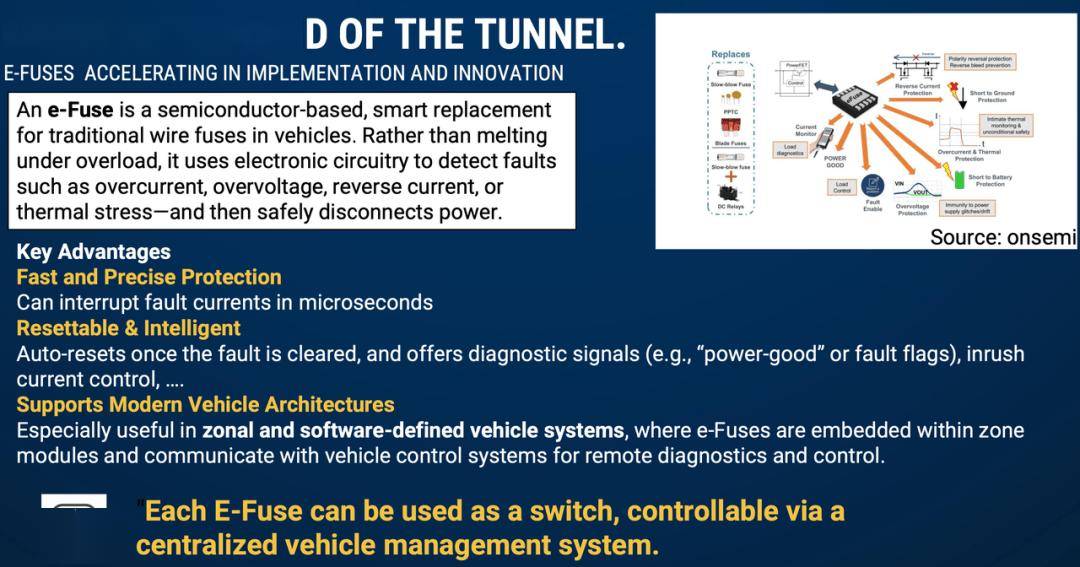
在控制睡眠唤醒的核心转折点来自 E-Fuse 的普及,这种半导体保险丝,是把“电源管理”从链路物理层提升到可计算、可控制的设备层。
传统保险丝面对故障只能熔断,而 E-Fuse 可在微秒级切断故障电流、可复位、可诊断、可远程控制,且能与区域控制器协同运行。
在区域化架构里,E-Fuse 让供电分区变成“可编程资源”,而不是不可逆的硬件结构。这种不见可以让车企真正意义上“重新夺回对电源系统的控制权”,而不是让每个 ECU 都按照设计意图执行关机协议。
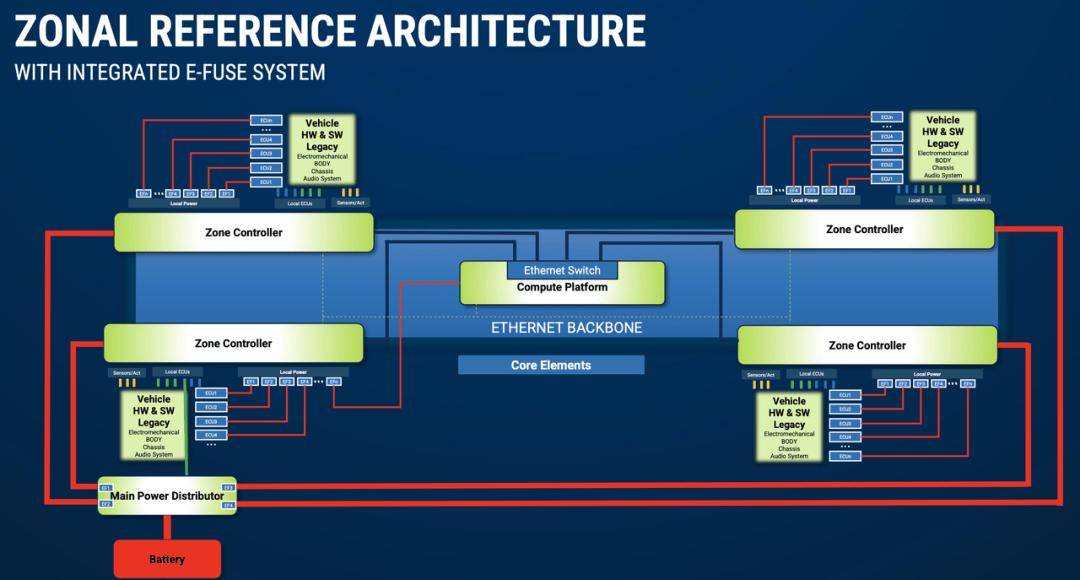
当 E-Fuse 被整合进区域控制器,控制睡眠唤醒的核心机理发生了改变:谁应该关机,由中央软件说了算;谁必须断电,由 E-Fuse 硬执行。
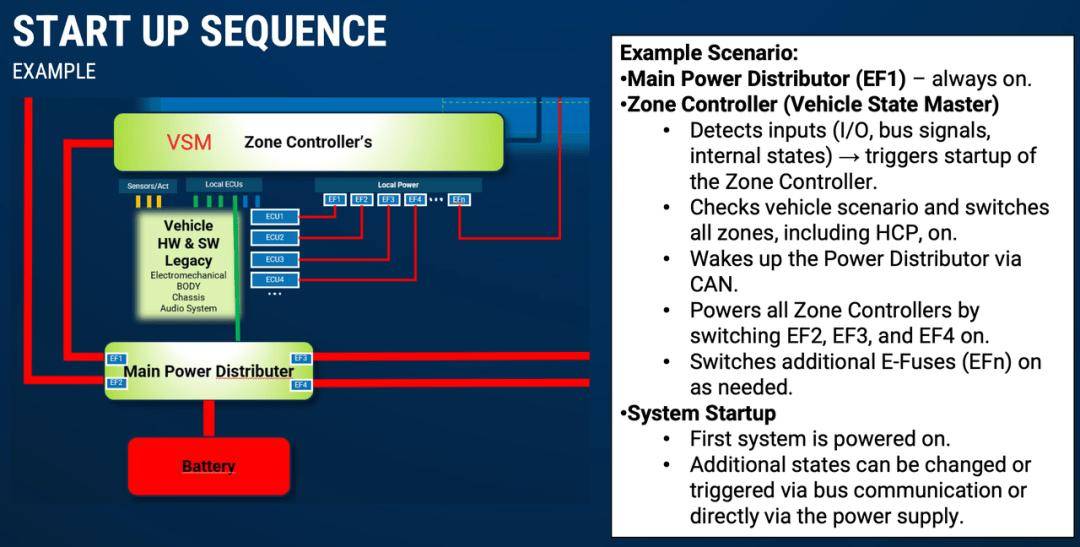
主电源分配器上 EF1 永久保持通电,区域控制器根据场景判断启动顺序,再通过 CAN 激活 EF2-EFn 的供电路径。
启动是由“车辆状态管理器 VSM”决定,下电待机也变为可控流程:ECU 正常响应时发“准备休眠”,异常时由主控制器强制断电,这使得“单个 ECU 失控导致整车不睡觉”的情况彻底被系统架构吸收。
主电源分配器的 E-Fuse(EF1)始终通电,启动流程是区域控制器(车辆状态管理器 VSM)检测输入信号(I/O、总线信号、内部状态)→ 触发自身启动 → 校验车辆场景,启动含 HCP 的所有区域 → 通过 CAN 唤醒电源分配器 → 开启 EF2-EF4 为所有区域控制器供电 → 按需开启额外 E-Fuse(EFn)→ 系统启动,可通过总线或电源供应更改 / 触发其他状态
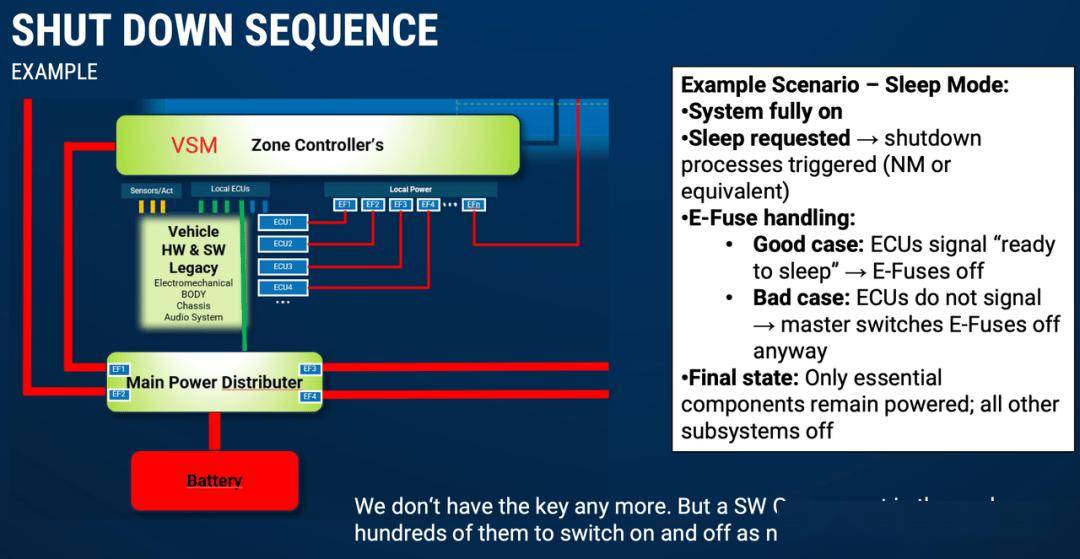
系统全负荷运行时收到休眠请求,启动关机流程(NM 或等效协议)E-Fuse 处理逻辑:
◎ 理想情况:ECU 发送 “准备休眠” 信号 → E-Fuse 关闭
◎ 异常情况:ECU 未发送状态 → 主控制器强制关闭 E-Fuse
必要组件保持供电,其余子系统全部断电,通过软件组件控制数百个功能的启停,恢复系统控制权。
过去二十年里汽车行业花大量力气在“如何可靠唤醒”和“如何保证整车睡得着”上的工程痛点,被一种新的架构彻底重构。
Open Alliance TC10 在传统架构中解决以太网唤醒,但当区域化架构成为主流,其角色也在发生变化:唤醒不需沿着复杂拓扑传播,而由配电软件与 E-Fuse 协同管理,网络变得更简洁、成本更低、状态更一致。
对于正在推进中央计算平台和以太网骨干的车企来说,这是一种更稳健的电源策略。
小结
智能汽车的一切状态由软件决定,E/Fuse 的主动配电能力正在悄悄重写整车 E/E 架构的底层逻辑,这点还是挺重要的!
在决定未来智能车的可靠性底线,在高算力、AI 模型、大规模 OTA 成为行业趋势时,如果底层电源系统仍停留在旧时代,系统无法保证可控的睡眠/唤醒逻辑。
E-Fuse 加区域架构真正解决的是智能车最隐蔽也最关键的问题,让智能汽车像一台计算设备那样“可预测地启动、可可靠地休眠”。